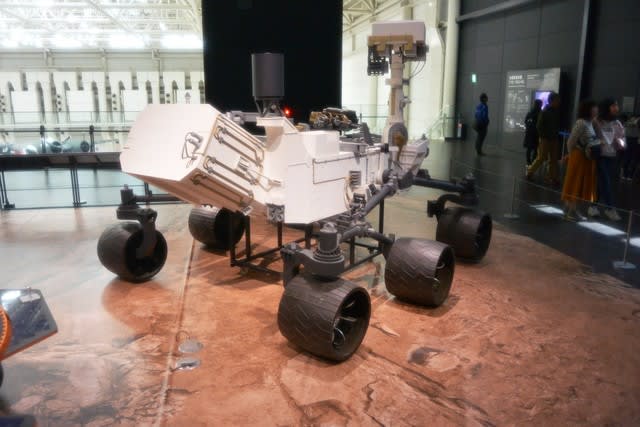
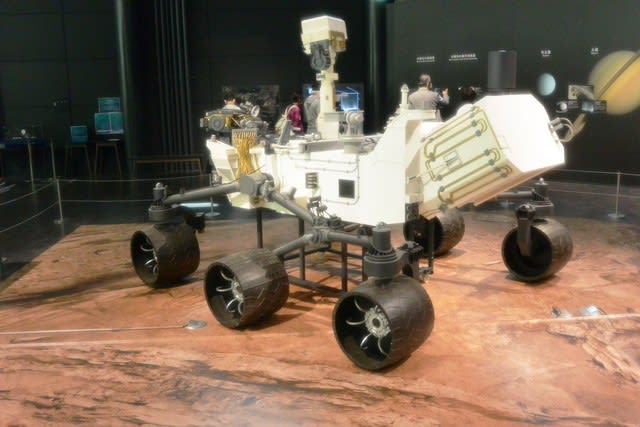
マーズ・サイエンス・ラボラトリー(Mars Science Laboratory、略称: MSL) は、アメリカ航空宇宙局 (NASA) が火星探査ミッションで用いる宇宙船の名称である。探査機ローバー、愛称キュリオシティ (Curiosity) を装備している。
キュリオシティは、2004年に火星に降り立ったマーズ・エクスプロレーション・ローバー (MER)(スピリットとオポチュニティ)の5倍の重量があり、10倍の重量の科学探査機器を搭載している。火星に着陸後、キュリオシティは火星表面の土と岩石をすくい取り、内部を解析する。最低でも、1火星年(2.2地球年)は活動する予定で、これまでのローバーよりも広い範囲を探索し、過去と現在の火星における、生命を保持できる可能性について調査する。

打ち上げまで
組み立て中のMSL
MSLは当初、2009年に打ち上げられ、2010年10月に、火星に着陸する予定であった。ただし、NASAでは2機か3機の全く同じローバーを同時に送ることが議論されており、そのためには打ち上げを2011年まで遅らせる必要があった。MSLの目的の一部は、将来のサンプルリターン・ミッションのために適当な着陸場所を見つけることだが、この案の推進者は、複数のローバーを使って一度に複数の地域を探索したほうがよいと主張した。NASAの太陽系部門のディレクターであるアンディー・ダンツラー (Andy Dantzler) は、MSLの開発は、2009年の打ち上げに向かって順調に進んでおり、この期限に間に合わせるために、最大限の努力をすると語った。ジェット推進研究所のエンジニアたちは、非公式にではあるが、MSLのデザインは、将来のローバーにも利用されるだろうと語った。
2008年に開発費用の超過が問題となり、試験に十分な時間がとれないとして、2008年12月4日、NASAは打ち上げを2011年に延期することを発表した。打ち上げ延期による追加支出は4億ドルで、最終的な予算総額は23億ドルになるという。複数のローバーを打ち上げる可能性については言及されなかった。
2008年11月から2009年1月にかけて、NASAは全米の学生・児童からローバーの愛称を募集した。5月27日、9,000件以上の案の中からカンザス州の12歳の少女が提案した「キュリオシティ(Curiosity、好奇心)」が選ばれたことが発表された。
2011年11月26日15時02分 (UTC)、MSLを搭載したアトラス Vがケープカナベラル空軍基地から打ち上げられた。
着陸後
2012年6月11日、NASAはキュリオシティが8月6日5時31分(UTC)ごろに、ゲールクレーター内にあるアイオリス山のふもとに着陸する見込みであると発表した。
2012年8月6日、NASAはキュリオシティが8月6日5時32分 (UTC) に、ゲールクレーターの中にある高さ3マイル、直径96マイルの山のふもとに着陸したと発表した。
2012年8月22日、NASAはキュリオシティの着陸地点に、2ヶ月前に亡くなった小説家のレイ・ブラッドベリに因み「ブラッドベリ・ランディング (Bradbury Landing)」と名づける案がチームから出され、NASAもこれを承認したと発表した。22日はブラッドベリの誕生日である。
2013年2月8日、キュリオシティが火星表面の岩に直径1.6cm深さ6.4cmの穴を掘り、試料を採取した。火星表面の本格的な掘削は、1960年代に火星探査が始まって以来初めてのことであった。
2013年8月6日、火星着陸一周年を記念して、本体に搭載した楽器で自分のために「ハッピーバースデー」を演奏 。
キュリオシティのアルミニウム製の6輪の車輪には、JPLのモールスコード・パターンを轍として残せるようにするための「・」と「-」マークの穴が開いているが、2013年秋に、予期せぬ穴が開いてきたことが確認された。車輪の摩耗はある程度予想されていたが、想定よりも摩耗が早く起きており、穴が開いた箇所以外の車輪でも窪みや損傷が生じていることが写真から確認された。この問題を受けて、ローバーの運用チームは、でこぼこの激しいルートを避け、尖った岩を回避する運用を行うことにした。さらに悪化すれば、ミッションへの影響が出る恐れもあるとして、JPLはソフトウエアパッチを書き換えて、この車輪の摩耗原因を調査することにした。
火星のゲール・クレーターに着陸して以来、総走行距離6.1kmに達したキュリオシティは、2014年4月2日に大規模調査を予定している「キンバリー」と呼ばれる地点に到着した。4つの異なる種類の岩石が重なりあった「キンバリー」(西オーストラリアの地域名に由来)における調査は、「イエローナイフ湾」と呼ばれる盆地の調査以来もっとも大規模なものとなる
仕様
キュリオシティは長さ3m、総重量は900kgあり、そのうち80kgが科学機器の重量である(MERは長さ1.5m、重量は174kgであり、そのうち6.8kgが科学機器の重量であった)。75cmくらいまでの障害物を乗り越えて進むことができる。走行速度は、自律航法の場合、最大90m/h程度であるが、数々の状況(電力レベル、視界、地表の荒さ、スリップなど)を考慮に入れると、平均では30m/h程度となると思われる。2年間の活動期間の間に、最低でも19kmの距離を移動する予定である。
電力源としては、プルトニウム238の崩壊熱を利用する原子力電池 (RTG) を使用する。火星探査機でのRTGは、バイキング1号とバイキング2号着陸機でも使用実績がある。昼夜や季節に関係なく一定の電力が得られるうえ、余熱はパイプを通じて探査機のシステムの保温に使用できる。キュリオシティで使われるRTGはボーイング社が開発した最新のMulti-Mission Radioisotope Thermoelectric Generatorと呼ばれるタイプである。重量は約50kgで4.8kgのプルトニウム238を搭載しており、打上げ時の事故で衝突、爆発、再突入による落下が起きてもプルトニウムが守られるように保護層で覆われている[13]。ミッション初期には約2000Wの発熱から125Wの電力を得られ、14年後でも100Wの電力が得られる。キュリオシティは1日に2.5kWhの電力が得られる(太陽電池を使用していたMERでは1日に約0.6kWhの電力しか供給出来なかった)。
キュリオシティが活動を予定している地域の火星の気温は、+30から −127℃の間で変動すると予想されている。このため、Heat rejection system (HRS) を使って機器の温度を維持する設計となっている。長さ60mのパイプ内にポンプで流体を流し、MMRTGからの熱で保温する。温度が上昇しすぎる場合は冷却にも使える。
キュリオシティに搭載された記録装置の容量は約4ギガバイトしかないため、打ち上げ時点では容量の大部分は着陸用ソフトウェア保持に使っており、そのままでは最小限の探査しか行えないが、地球から遠隔でアップデートできるように設計されているため、火星到着後は不要になったソフトウェアを観測器機の制御用ソフトに更新してから本格的な運用を始める。
観測機器
Sample analysis at Mars (SAM) 試料を加熱して生じたガスや、大気分析する装置。
ChemCam
赤外線レーザーを使って、最大7m離れた土壌や岩の表面を蒸発させてスペクトル分析を行う。
Mastcam マストの先端にメガピクセル単位の画素数を持つ2台のカメラが設置され、毎秒最大10フレームのカラー画像を720p (1280x720) のハイビジョン画質取得できる。中解像度のカメラMedium Angle Camera (MAC) と、高解像度のカメラNarrow Angle Camera (NAC)。動画も撮影可能。
αプロトンX線分光計 (APXS)
CheMin
Mars Hand Lens Imager (MAHLI) ロボットアーム先端に設置した顕微鏡カメラ。
Radiation assessment detector (RAD)
Rover environmental monitoring station (REMS)
Dynamic albedo of neutrons (DAN)
MSL Mars Descent Imager (MARDI) キュリオシティの降下中に火星表面のカラー画像を撮影する。約2分の間に毎秒5枚の撮影を行う。

誘導突入
火星は大気が薄いため、重量物を着陸させるのは非常に難しい。パラシュートや空力ブレーキだけでは減速が不十分であり、過去に使用されたエアバッグを使って衝撃を抑える着陸方式もキュリオシティほどの重量がある場合は使えない。このため、MSLでは幾つかの方式を組み合わせると共に、新たな着陸方式が採用された。 キュリオシティはエアロシェルに格納されて火星大気へ突入し、その外殻を用いた空力ブレーキで減速する。このエアロシェルは直径4.5mという宇宙用としては過去最大であり、Phenolic Impregnated Carbon Ablator (PICA) という耐熱材で高熱から保護される(MSL用に開発されたPICAは、スペースX社がPICA-Xとしてドラゴンの耐熱シールドに採用した)。これにより、突入時の速度 5.3から 6 km/sをパラシュートが開ける速度であるマッハ2にまで減速する。
パラシュート降下
重心調整用のダミーウエイトを投棄した後、高度約7kmで超音速パラシュートを開傘し、耐熱シールドを分離する。パラシュートは直径16m、長さ50mという巨大なものとなる。パラシュート降下中にキュリオシティの下側に装備したカメラで毎分5枚の写真撮影を開始する。これにより、どこに着陸したか精密な地点を素早く確認できるようになる。
ロケット噴射による降下
高度約1.8km、速度約100m/sの時点で降下ステージを切り離し、推力調節が可能なヒドラジンスラスタ8基(推力各3.1 kN)を噴射して減速する(このシステムはバイキング着陸機の技術が流用されている)。
スカイクレーン
MSLはスカイクレーンを使ってキュリオシティを軟着陸させる。降下ステージとキュリオシティとの間は懸架ケーブルと電気信号を送るケーブルで繋がれた状態で約7.5m吊り下げる。キュリオシティの軟着陸を確認すると約2秒後に火工品でケーブルカッターを作動させてケーブルを切断し、降下ステージはスラスタをフル噴射し退避しながら離れた場所に落下する。このようなシステムは今回初めて使用される
所属 アメリカ航空宇宙局 (NASA)
主製造業者 ボーイング
ロッキード・マーティン
公式ページ Mars Science Laboratory
国際標識番号 2011-070A
カタログ番号 37936
状態 運用中
目的 火星探査
観測対象 火星
打上げ場所 ケープカナベラル空軍基地 LC-41
打上げ機 アトラスV 541型
打上げ日時 2011年11月26日
15時02分(UTC)
軟着陸日 2012年8月6日
5時32分(UTC)
質量 900kg
Sample analysis
at Mars (SAM) 試料を加熱して生じたガスや、大気分析する装置